
Baby “MIT Cheetah” opensource and 3D-printable robot
This 3D printable ” Baby MIT Cheetah” robot is easy to build, using simple components like Arduino and SG90 servos. The robot is able to run, walk, crawl, rotate and and run in different heights, take push ups and small jumps!
Open-Source
The author Jegatheesan Soundarapandian released the source code, files, and instruction to build and make your own version! The Baby cheetah size is only 23 cm X 9 cm X 9 cm . Great work 🙂 !
I like to see robots walk like animals and I was inspired to MIT’s Cheetah project, so name it as “BABY MIT CHEETAH”!
List of components:
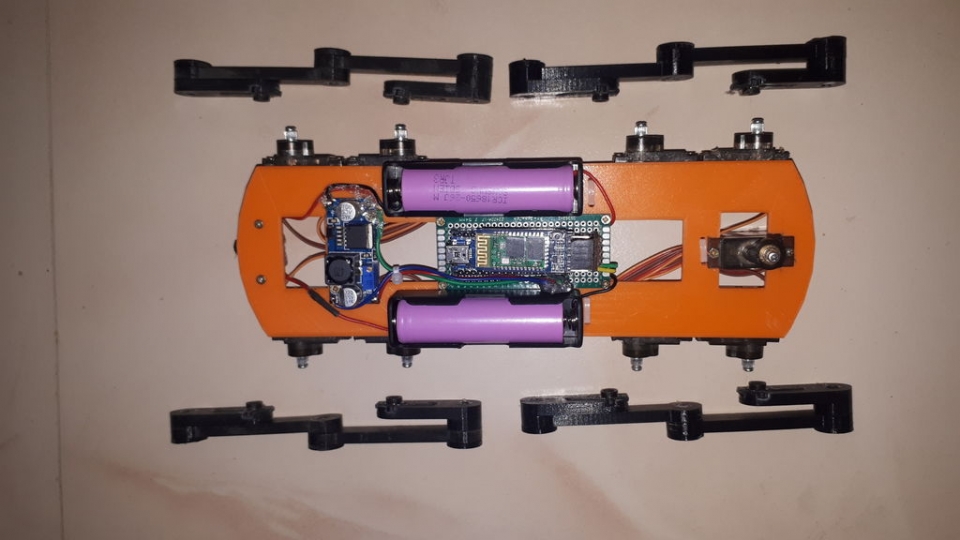
- x1 Arduino nano
- x1 HC-05 Arduino bluetooth module
- x9 MG90S Servo
- x1 Ultrasonic Sensor HC-SR04
- 3D print Body x1 and Legs x8 .
- x1 Ultrasonic Sensor Mount
- x1 LM2596 DC to DC Voltage Regulator
- x2 3.7V 18650 Battery
- x2 18650 Single Battery Holder
- x1 ON/OFF Switch.
- x32 M2 X 10 mm screw with nut
- x1 Double Side plain PCB board
- various Male and Female Header pins and wires

Mobile App :

Baby MIT Cheetah Robot also include a control app designed with MIT App Inventor created by the author.
Using that the robot can be controlled via Bluetooth (RC Mode) provide computational power of your smartphone for an “autonomous navigation mode” ( AI Mode )
[Download instructions via Instructables here]