
MOLOID robot achieve full movement in a clever way
Forget the old school wheels and legs, here we are talking about momentum, balance and trajectories using Paul Schatz ‘s OLOID geometrical designs .
MOLOID (or Moving OLOID) is a robot “pet” that is able to move in all direction. The robot balance will be altered using small weight (using only x2 cheap servo) creating great movement with small amount of energy.
This project was developed by Jan Ingo Haller and Lorin Samija as part of the Computational Design and Digital Fabrication Seminar in the Master’s programme
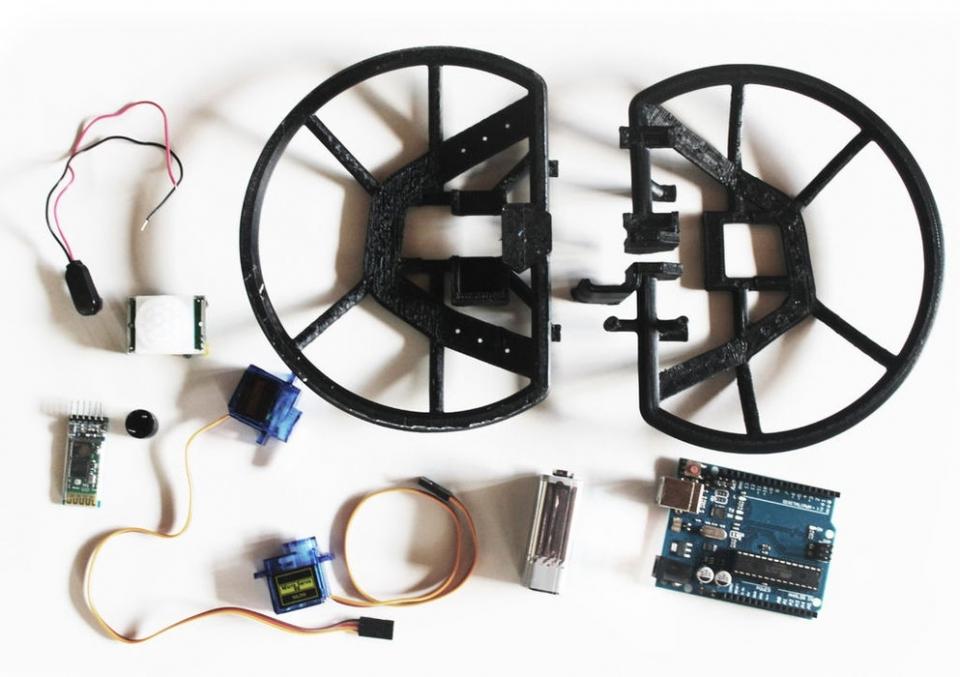
We are using an Arduino UNO to make all of this happen. Two servos will be dealing with the weight movement. The movement itself will be triggerd through a passive infrared sensor, i.e. a motion sensor. In order to have more control over the mOLOID, we are using a HC-05 Bluetooth module for Arduino, which let’s us communicate with the Arduino via SerialPortPorfile (SPP).
List of components:
- Arduino UNO
- 2 x Micro 9g Servos
- Bluetooth HC-05 module for Arduino
- Passive Infrared Sensor HC-SR501 module for Arduino
- Passive Buzzer
- 9V Battery
- flat metal or wooden pieces
- 6 x 20-Australian-cent coins (or similar) for the weights
- 1 x 1k and 1 x 2k resistor (the 2k resistor can also be just two 1k resistor in series)
- Screws (3xM2/20, 3x Nuts M2, 8xM2/6, 2xM2/10, some M2 small wooden Screws)
- Glue (Ruderer)
- Tape
- Jumper Wires (many: M/M, F/M)
- Some thread or wire
- Cloth (optional)
- Spraypaint (optional)
The robot require some 3D printed parts , each building step is well documented with picture and explanation in the source below. Great Work!
SOURCE: download the 3D files and Code of MLOID project here