
Researchers shoots robotic drones in the air for fast deploy
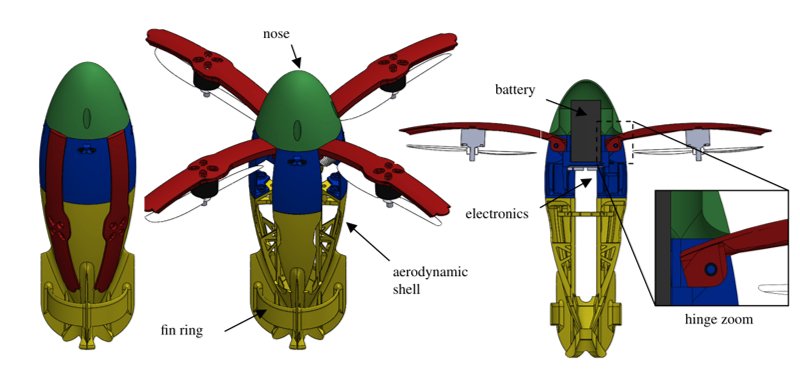
An aerodynamic “missle” shape that enable deployment of this drone in the air following a safe path instead of flying from ground. Also this form enable deployment from movable objects like car or boats.
SQUID is 3D printable, and uses a 3 inches diameter barrel launcher .The system has been fabricated and field tested from a moving vehicle up to 50mph. Once it reaches an altitude of around 200 meters the drone itself open its propellers and fly to destination.
The idea is to use this type of drones for space exploration in difficult environment like Mars and Titans. You can now have a cloud of the little drones in seconds.
Authors & References : D. Pastor, J. Izraelevitz, P. Nadan, A. Bouman, J. Burdick, and B. Kennedy, “Design of a Ballistically-Launched Foldable Multirotor”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019