
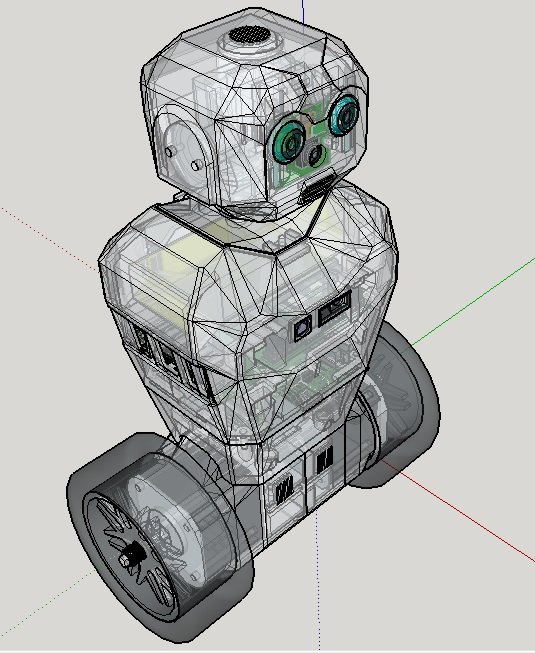
RS5 – 3D printed Raspberry Pi robot
RS5 3D printed robot is the result of precise balancing and computer vision based on RaspberryPI 3 .
The idea of Samuel Matos :
The idea for this robot is to have a platform to implement cool features, it has some potential that can be used to develop a really nice robot. I would like to make it available for other people, that would require some more time and money to develop it, make it more close to a product. I’m not sure if there are people interested in a robot that requires some advanced programming skills.
The robot components communicates via UART, using a Bluetooth . RaspberryPI 3 controls directly the the microcontroller that balance the robot depending on the task and the current orientation from the sensors.
Features:
- Lines follows
- Objects Tracking
- Marker recognitions
- Balancing
- The robot’s head points to the current tracked object
Components:
- Actuators / output devices: 2 servos, 2 Stepper Motors
- Control method: autonomous, Bluetooth
- CPU: Microchip PIC, Raspberry Pi ARM
- Operating system: Linux(Raspbian)
- Power source: Lipo 3S 2000 mAh
- Programming language: C++, C
- Sensors / input devices: HC-SR04, MMA7361 Accelerometer, Raspberry Pi camera module, Murata ENC-03 gyro
- Target environment: indoor
Files
We don’t have the files and the code for Rs5, but the project is based on Remote Controller Self Balancing Arduino Robot – by jjrobots
We encourage to build your own remix and share with the opensource community !
NEXT: Want to build your robot? check our OpenSource Robot section !