
This week in robotic : Tuna-robot and Smarticles
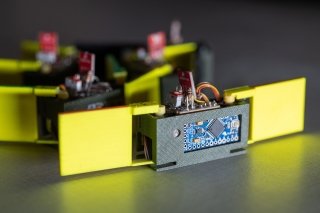
Building collaborative robot may be a winning strategy for this robots known as “smarticles“. The single robot can’t do much alone : it has some light sensor and can flap it’s arms, but once in a group they behave like a single organism and they’re capable of move all together.
We are not looking to put sophisticated control, sensing and computation on them all. As robots become smaller and smaller, we’ll have to use mechanics and physics principles to control them because they won’t have the level of computation and sensing we would need for conventional control. Dunn Family Professor in the School of Physics at the Georgia Institute of Technology.
By tweaking their geometry, the robots could achive different tasks like following light, moving objects and rotating.
NEXT : MIT’s modular robot is made of 5 different tiny bricks
Tuna Robot
Mechanical engineers at the University of Virginia School of Engineering, leading a collaboration with biologists from Harvard University, have created the first “Tuna-bot” robotic fish proven to mimic the speed and movements of yellowfin tuna.
This robot aim to help to study “faster” marine species like tuna, squids and sharks in their natural environment.
NEXT : This realistic robotic fish is always fresh