
3D printed “GorillaBot” robot run and jumps around 🦍 !
GorillaBot by Sebastian Coddington is a full 3D printed opensource robot based on the Baby MIT Cheetah!
Design Upgrades
The design is based on a five bar linkage mechanism for each leg 2 servos power each leg for a total of 8 servos. The robot uses Arduino Nano as brain, a servo controller , x2 18560 Lipo battery and ultrasonic sensors to navigate in the track.
The robot was build to compete in the Toulouse Robot Race #TRR2021 (France) where quadruped and biped robots compete in a 10 meter sprint race.
The race consists of a 10 meter autonomous sprint for biped and quadruped robots. The current record I gather for quadrupeds is 42 seconds for a 10 meter sprint.
Fully 3D printed & OpenSource
Everything apart from the electronics and screws to attach the electronics are 3D printable making GorillaBot fully customizable and easy to assemble, it can cost as low as 75$.
The list of electronic components is the following:
- 8x Tower Pro MG90S analog 180 deg servo
- Sunfounder Wireless Servo Control Board
- Arduino NANO
- NRF24L01 Transceiver Module ( to use with remote controller )
- Magnetometer (digital compass) QMC5883L GY-273
- 1x Ultrasonic sensor HC-SR04
- 2x 18650 3.7V Li-ion batteries
- 18650 dual Battery holder with on off switch
- 18650 Li-ion Battery charger
- 4x female to female dupont jumper cables 10 cm long
- 4x female to female dupont jumper cables 20 cm long
- 10x Screws 2mm x 8mm
- 3D printed parts
- Source Code ( Arduino )
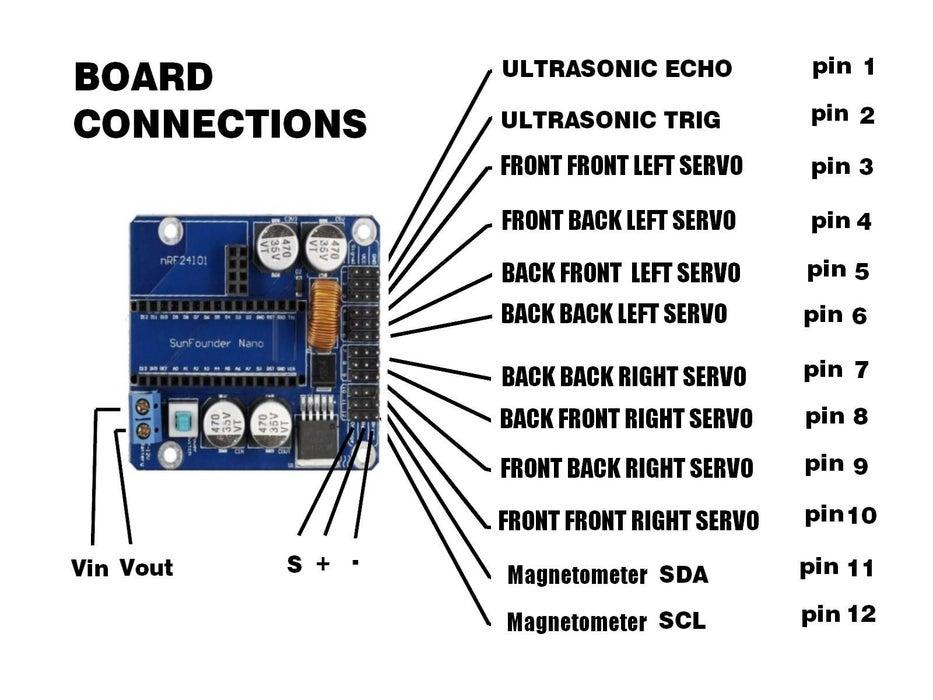
Schematics :
The robot battery life depends on the usage but can go up from 15 to 45 minutes.
Congratulation Sebastian, looking forward your next robot 🙂 !